Wiki¶
| Organisation | Applied Informatics, Bielefeld University |
| Projects | A4 - Alignment of Situation Models, SFB673 Alignment in Communication |
| Project Descriptions | The project explores how shared situation models arise and adapt over time in communication about environments. In this context, it deals with the interaction of the formation and adaptation processes with the interlocutor’s visual perception. This is explored in human-human as well as human-robot scenarios, combining psycholinguistic experiments and computational modelling. |
| Title | 3D Indoor Scenes Database |
| Version | Version 1 |
| Date | 2009-09-01 |
| Creators | Agnes Swadzba |
| Contributors | Philipp Nitz |
| License | ODC-By v1.0 |
| Description | This database was collected to explore spatial features for 3D indoor scene classification. It consists of sequences of 3D point clouds collected with a Swissranger. Each sequence shows a room of a certain room type. The data was collected while the camera was panned and tilted simulating a robot entering a room and looking around. The database is assembled from 28 sequences one sequence per specific room. A sequence is represented as set of text-files where the z-, x-, and y-values of one frame are stored row-wise in one file. |
| Keywords | indoor scenes, 3D data, Swissranger, scene classification |
| Structure | an archive per room |
| Format | text-files, e.g. bath1/frame_0001.dat; jpg-images of depth and amplitude data |
| Relation | http://pub.uni-bielefeld.de/publication/2563576, http://pub.uni-bielefeld.de/publication/2034745 |
| Acknowledgements | This work was supported by the SFB673. |
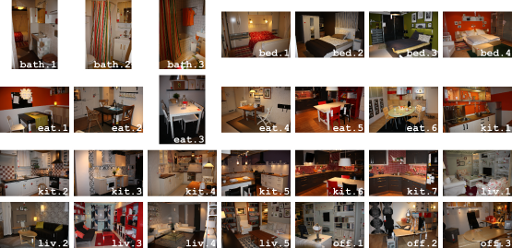
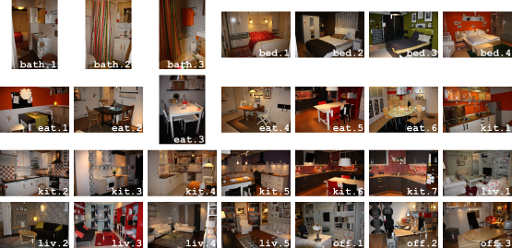
The 3D-IKEA database consists of 28 indoor rooms of 6 room types (e.g. kitchen, living room, bedroom, ...) collected in 2009 in the exhibition of IKEA. Each room is captured as a sequence of 300 to 400 frames per room recorded with a SwissRanger SR3000 camera being panned and tilted continuously simulating the view of a robot entering a room and looking around. Each frame is a 3D point cloud assembled from 176 x 144 (x,y,z)-values. We used this database to develop and evaluate 3D features for 3D indoor scene classification, which is an important input for a interactive robot to establish spatial knowledge for its situation model of surrounding environment.
We also provide some Matlab-code to load data from the database, to preprocess the data, and to plot the 3D point clouds. Further, code is given for extracting planar surfaces contained in one frame and for converting this set of patches to a 3D feature vector encoding the spatial layout captured by the frame.
{kind=link}